Integracja z systemowymi wózkami widłowymi Jungheinrich
Najnowsza wersja Comarch WMS 2023.5 umożliwia komunikację między aplikacją, a systemowym wózkiem firmy Jungheinrich. Komunikacja między Comarch WMS, a wózkiem będzie jedno lub dwukierunkowa i odbywać się będzie poprzez interfejs logistyczny Jungheinrich. O tym jaki typ komunikacji ma mieć miejsce, decyduje użytkownik systemu. Komunikacja między WMS, a interfejsem odbywa się poprzez wykorzystanie metody połączenia REST (REpresentational state transfer). Operator w momencie krokowej realizacji pozycji w Comarch WMS Magazynier będzie inicjował wywołanie punktu końcowego REST (endpoint), a interfejs logistyczny będzie wysyłał odpowiedź do Comarch WMS dotyczącą otrzymania zadania. Dodatkowo po zrealizowaniu zadania przez wózek systemowy, interfejs logistycznych Jungheinrich prześle informacje do WMS potwierdzając wykonanie zadanego polecenia (komunikacja dwukierunkowa). To potwierdzenie dla Comarch WMS będzie równoznaczne z pobraniem/odłożeniem jednostki logistycznej z/na dane położenie, a więc z przejściem na kolejny krok realizacji pozycji.
W Comarch WMS Zarządzanie została dodana nowa opcja konfiguracyjna: Obsługa wózków systemowych Jungheinrich (Ustawienia->Ogólne).
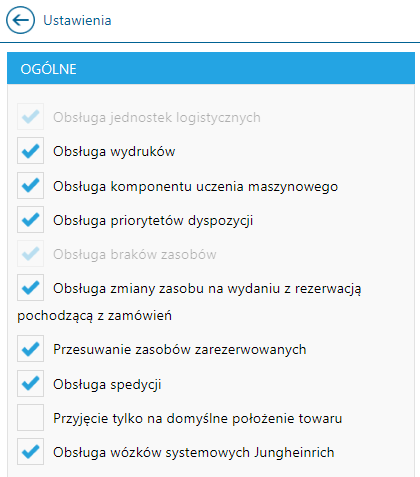
Zaznaczenie parametru dot. obsługi wózków będzie wiązało się z pojawieniem nowego modułu w Ustawieniach Comarch WMS Zarządzanie:

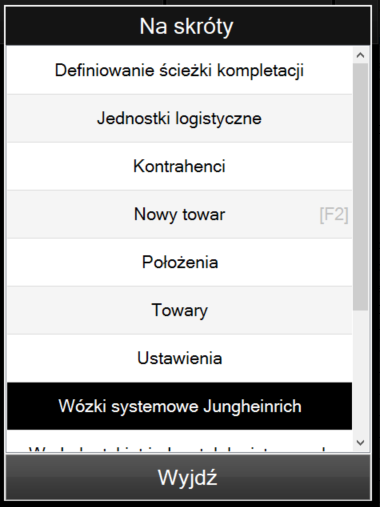
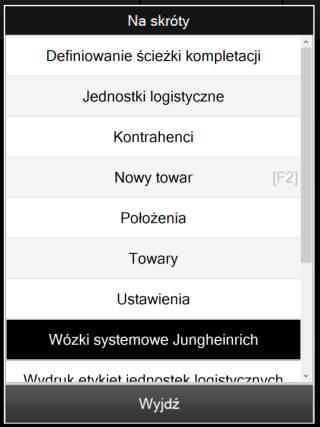
oraz nowego przycisku Wózki systemowe Jungheinrich w menu na skróty w Comarch WMS Magazynier:
Konfiguracja wózków systemowych Jungheinrich w Comarch WMS Zarządzanie
Po wejściu w konfigurację wózków systemowych Jungheinrich w Comarch WMS Zarządzanie należy uzupełnić poszczególne pola:

KOMUNIKACJA Z WÓZKAMI SYSTEMOWYMI JUNGHEINRICH:
- Typ komunikacji:
- Jednostronna (domyślna) – Pozostawienie zaznaczonej wartości będzie skutkowało zainicjowaniem komunikacji jednokierunkowej (potwierdzenie wykonania zadania przyjdzie do WMS poprzez skan kodu położenia przez operatora). Wózek nie będzie przekazywał potwierdzenia do WMS. Przy zaznaczeniu tego parametru, sekcja LISTA WÓZKÓW SYSTEMOWYCH JUNGHEINRICH wygląda następująco:

- Dwustronna – Zaznaczenie wartości będzie skutkowało zainicjowaniem komunikacji dwukierunkowej (potwierdzenie wykonania zadania zostanie przesłane przez wózek systemowy). W przypadku zaznaczenia tego parametru sekcja LISTA WÓZKÓW SYSTEMOWYCH JUNGHEINRICH zawiera dodatkowo parametry: IP usługi WMS, Numer Portu usługi WMS:

- Jednostronna (domyślna) – Pozostawienie zaznaczonej wartości będzie skutkowało zainicjowaniem komunikacji jednokierunkowej (potwierdzenie wykonania zadania przyjdzie do WMS poprzez skan kodu położenia przez operatora). Wózek nie będzie przekazywał potwierdzenia do WMS. Przy zaznaczeniu tego parametru, sekcja LISTA WÓZKÓW SYSTEMOWYCH JUNGHEINRICH wygląda następująco:
W przypadku zmiany typu komunikacji dla skonfigurowanych już wózków systemowych, zostanie wyświetlony komunikat:
LISTA WÓZKÓW SYSTEMOWYCH JUNGHEINRICH
Zależnie od wybranego typu komunikacji (jednostronny, dwustronny) w tej sekcji należy uzupełnić wymagane pola:
- Nazwa wózka – unikalna nazwa wózka
- IP wózka – adres IP wózka (wartość, która zostanie określona będzie wykorzystywana przy wywołaniu połączenia REST API)
- Numer portu wózka – numer portu wózka, po którym nastąpi próba połączenia REST API
- IP usługi WMS (przy wyborze typu komunikacji: dwustronna) – adres IP, na którym działa usługa WMS
- Numer Portu usługi WMS (przy wyborze typu komunikacji: dwustronna) – numer portu, na którym nasłuchuje usługa WMS
- Profil operatora – wybór profilu operatora, dla którego będzie dostępny wózek w Comarch WMS Magazynier
W przypadku podania niepoprawnej wartości, zostanie wyświetlony komunikat:
W przypadku wprowadzenia takich samych wartości pary: IP i numeru portu (dla wózka systemowego), dla dwóch lub wielu pozycji zostanie wyświetlony komunikat:
Konfiguracja kroków z położeniem dla wybranych procesów
W przypadku chęci skorzystania z wózków systemowych na danym procesie, należy ustawić parametr @GeneratedTransportProcess (na kroku z położeniem) i przekazać odpowiednią wartość parametru (polecenie dla wózka systemowego). Skonfigurowanie kroków ma na celu przekazanie odpowiedniego zadania (procesu) do wózka systemowego. Użytkownik sam będzie decydował jakie zadanie powinien otrzymać wózek na danym kroku z położeniem.
| Wartość dla parametru @GeneratedTransportProcess | Proces | Polecenie |
| 1 | Load a pallet | L;<Location> |
| 2 | Unload a pallet | U;<Location> |
| 3 | Order picking | O;<Location> |
| 4 | Go to position | G;<Location> |
| 6 | Empty pallet collection | E;<Location> |
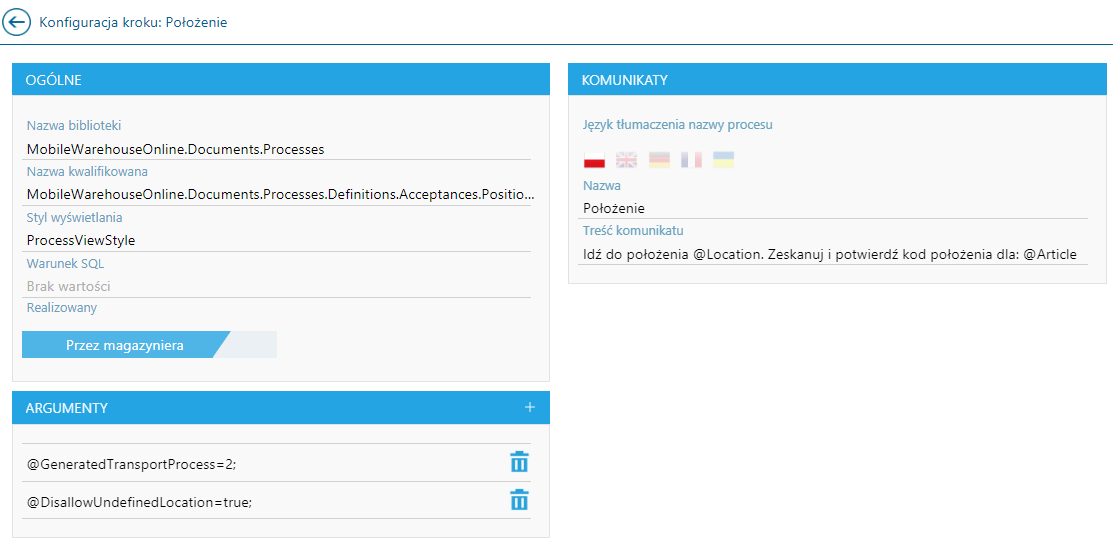
Przykład kroku z położeniem z dodanym parametrem @GeneratedTransportProcess=2 – polecenie: rozładowanie palety.
Obsługa wózków systemowych Jungheinrich w Comarch WMS Magazynier
W przypadku prawidłowej konfiguracji wózków systemowych Jungheinrich w Comarch WMS Zarządzanie, w aplikacji Comarch WMS Magazynier, zostanie uaktywniony nowy przycisk w menu na skróty:
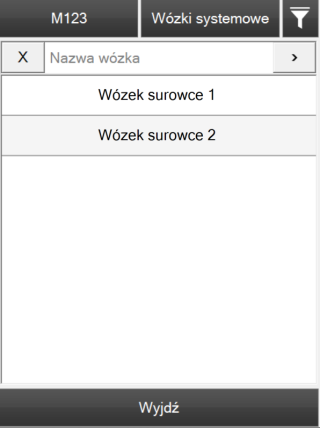
Wybranie przycisku: Wózki systemowe Jungheinrich, zostanie wyświetlona lista dostępnych dla operatora, wózków systemowych.
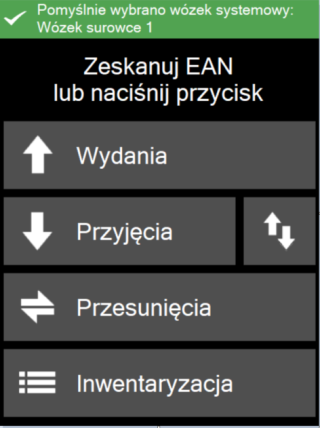
Po wybraniu nazwy wózka zostanie wyświetlony komunikat typu toast o prawidłowym przebiegu powiązania z wózkiem oraz w górnej belce pod nazwą operatora, zostanie wyświetlona nazwa powiązanego wózka systemowego.
Realizacja wydania zasobu znajdującego się na jednostce logistycznej – wydanie pełnej palety:
- Krok z położeniem źródłowe (pobranie towaru) – ustawiony parametr @GeneratedTransportProcess=1
- Krok z położeniem docelowym – ustawiony parametr @GeneratedTransportProcess=2
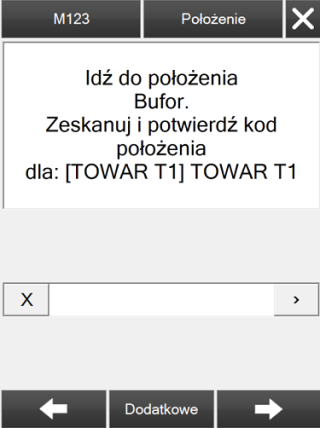
podczas wywołania komunikacji z interfejsem logistycznym przesłane zostanie odpowiednie zadanie wraz z podpowiedzianym położeniem. W przypadku komunikacji jednostronnej, wózek Jungheinrich poprowadzi operatora do określonego położenia, zostanie wykonana akcja, ale krok z położeniem nie zostanie zatwierdzony w Comarch WMS Magazynier – operator będzie musiał potwierdzić krok w aplikacji. W przypadku komunikacji dwustronnej, wózek Jungheinrich poprowadzi operatora do określonego położenia, zostanie wykonana akcja, krok z położeniem zostanie automatycznie zatwierdzony w Comarch WMS Magazynier.
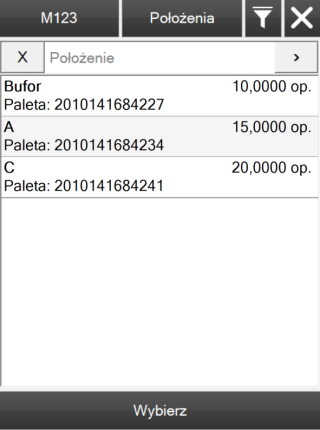
Istnieje możliwość zmiany położenia, po wybraniu listy rozwijanej.
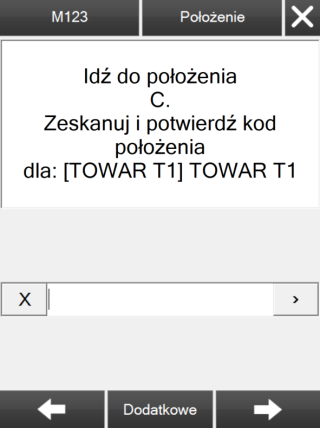
Po wybraniu położenia, nowa akcja (z nowym położeniem) zostanie automatycznie przesłana do interfejsu logistycznego Jungheinrich.
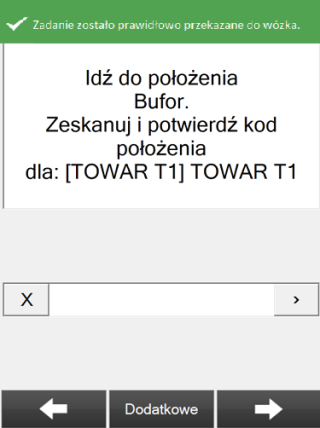
Po poprawnym przekazaniu zadania do wózka, zostanie wyświetlony komunikat:
W przypadku wystąpienia problemów z przekazaniem zadania, również zostanie wyświetlony odpowiedni komunikat: